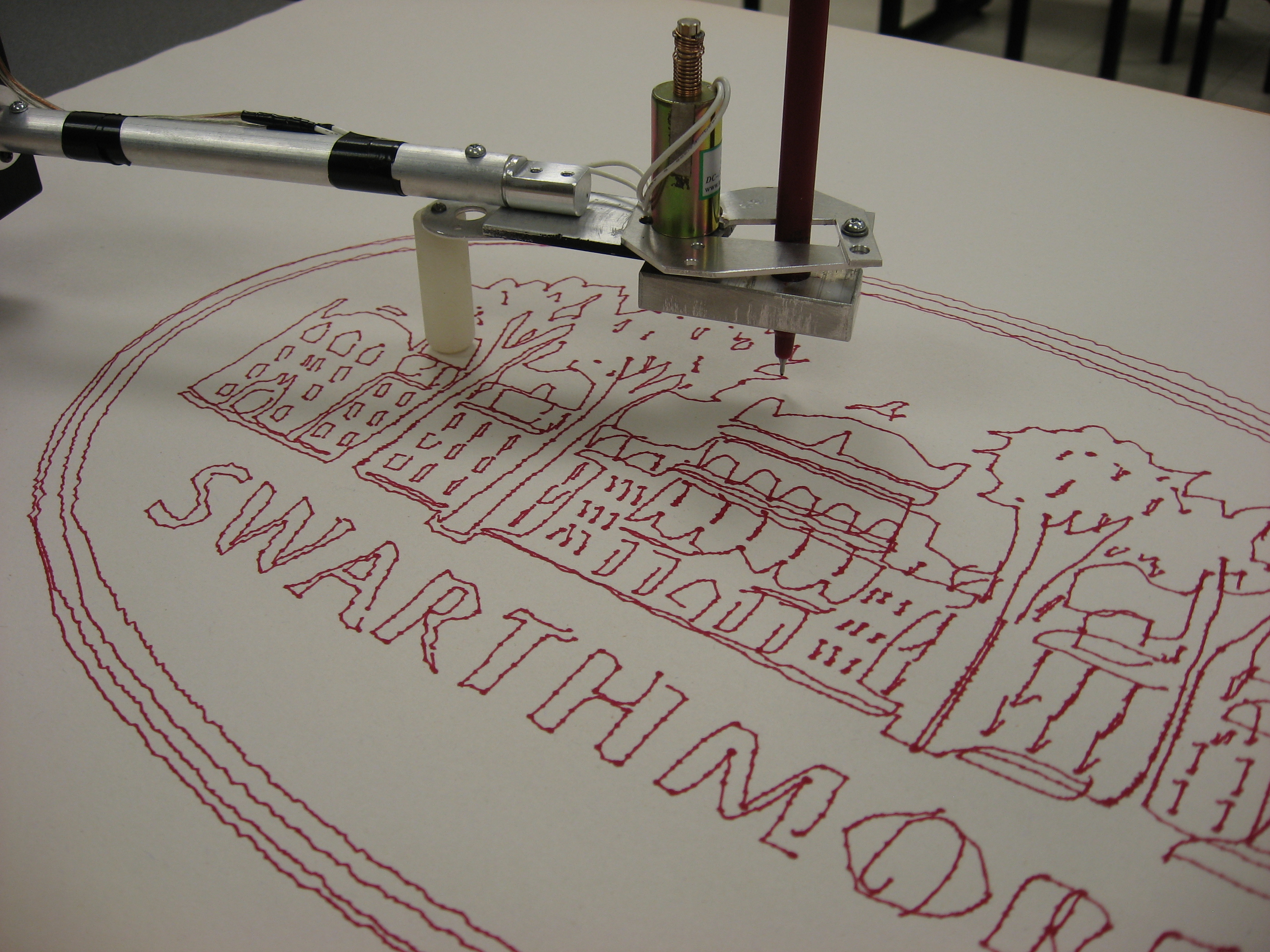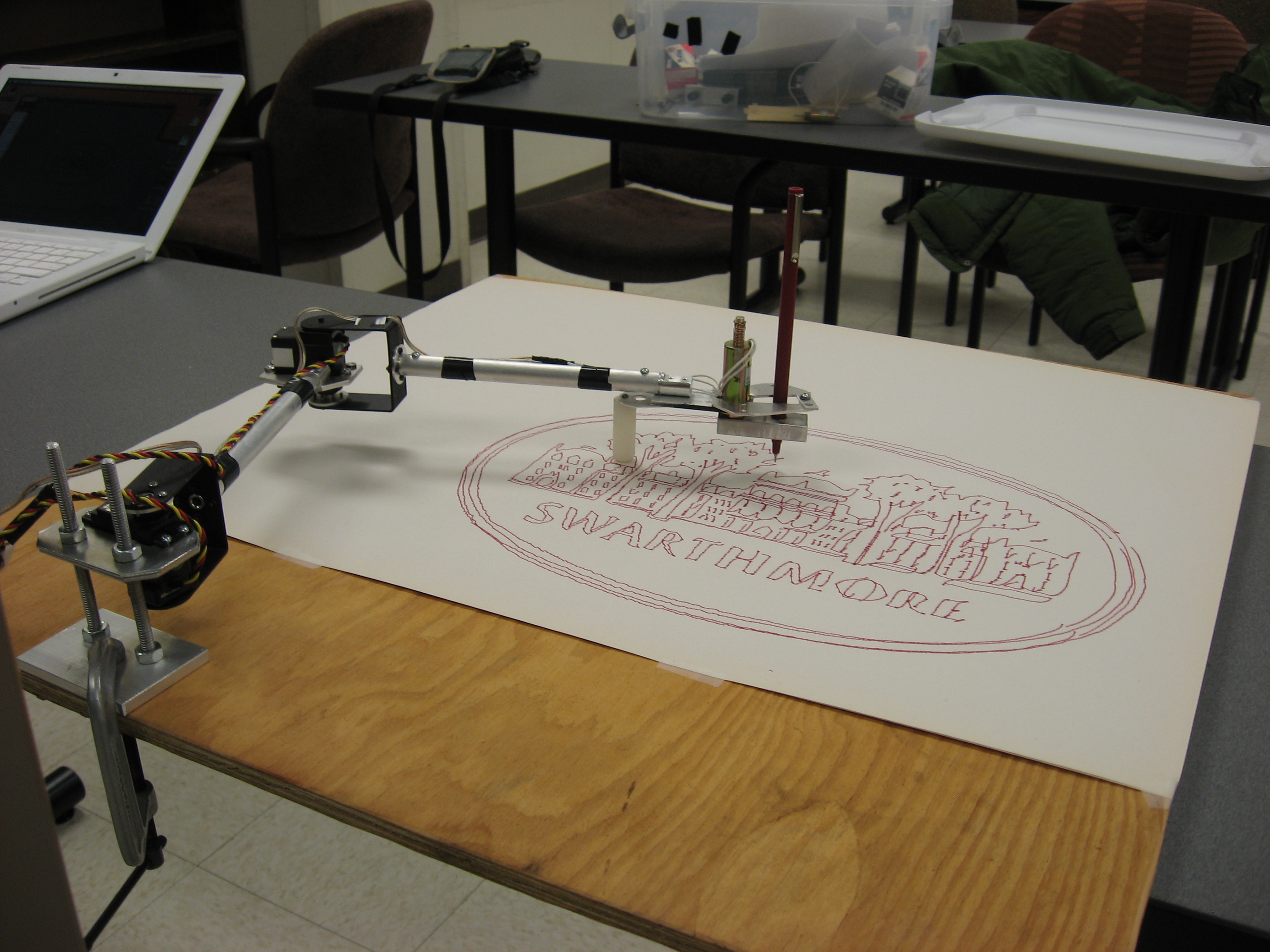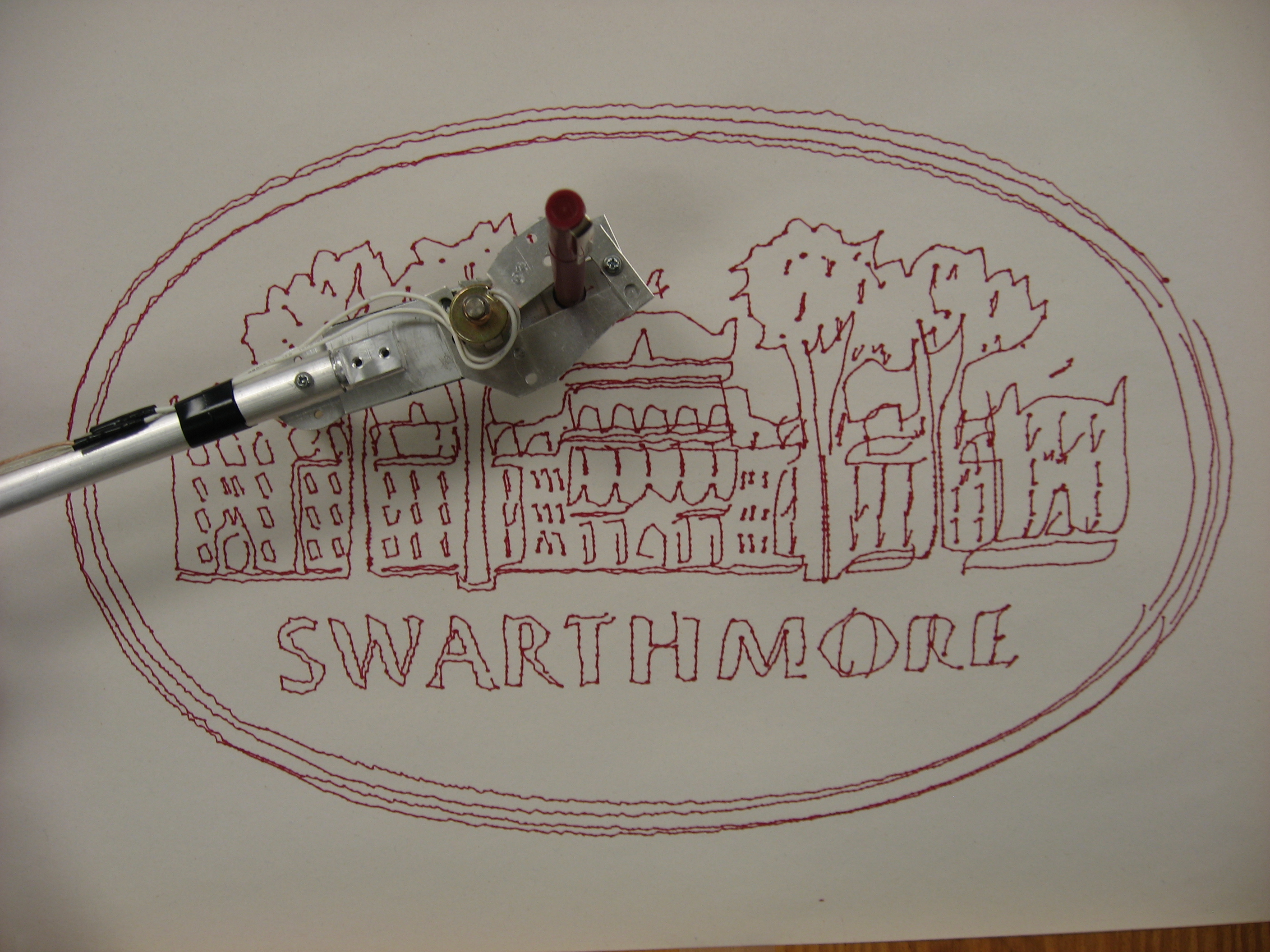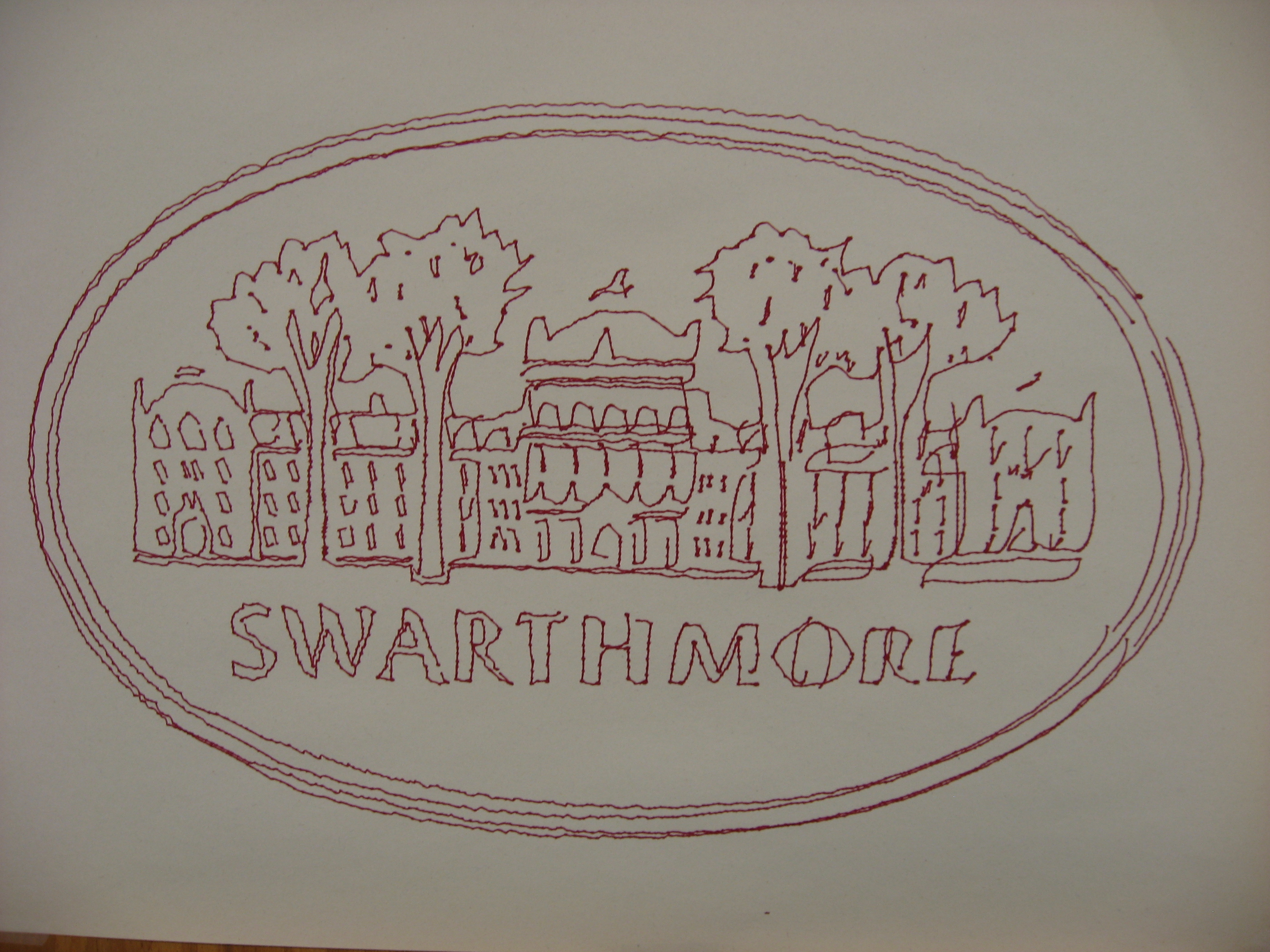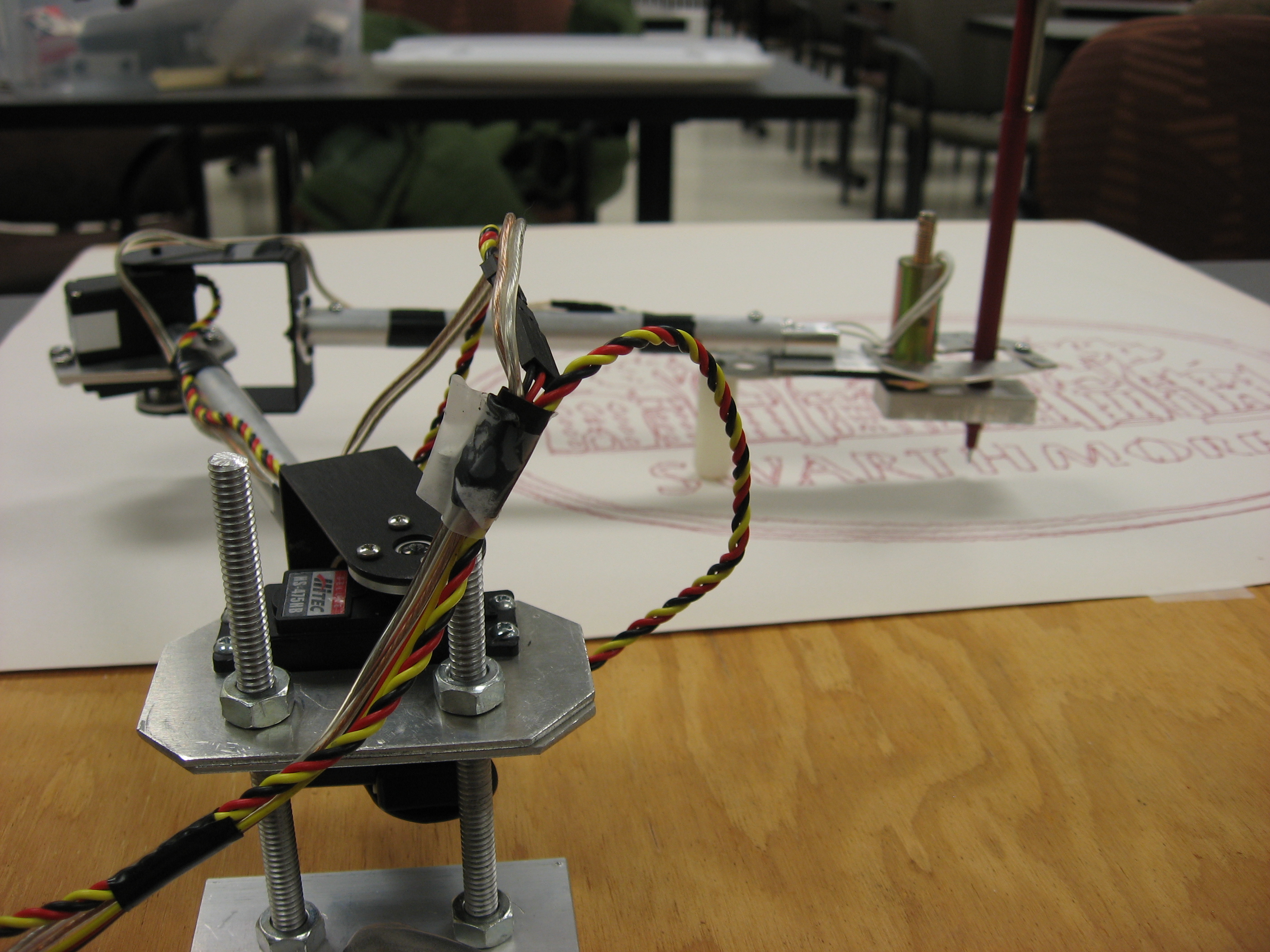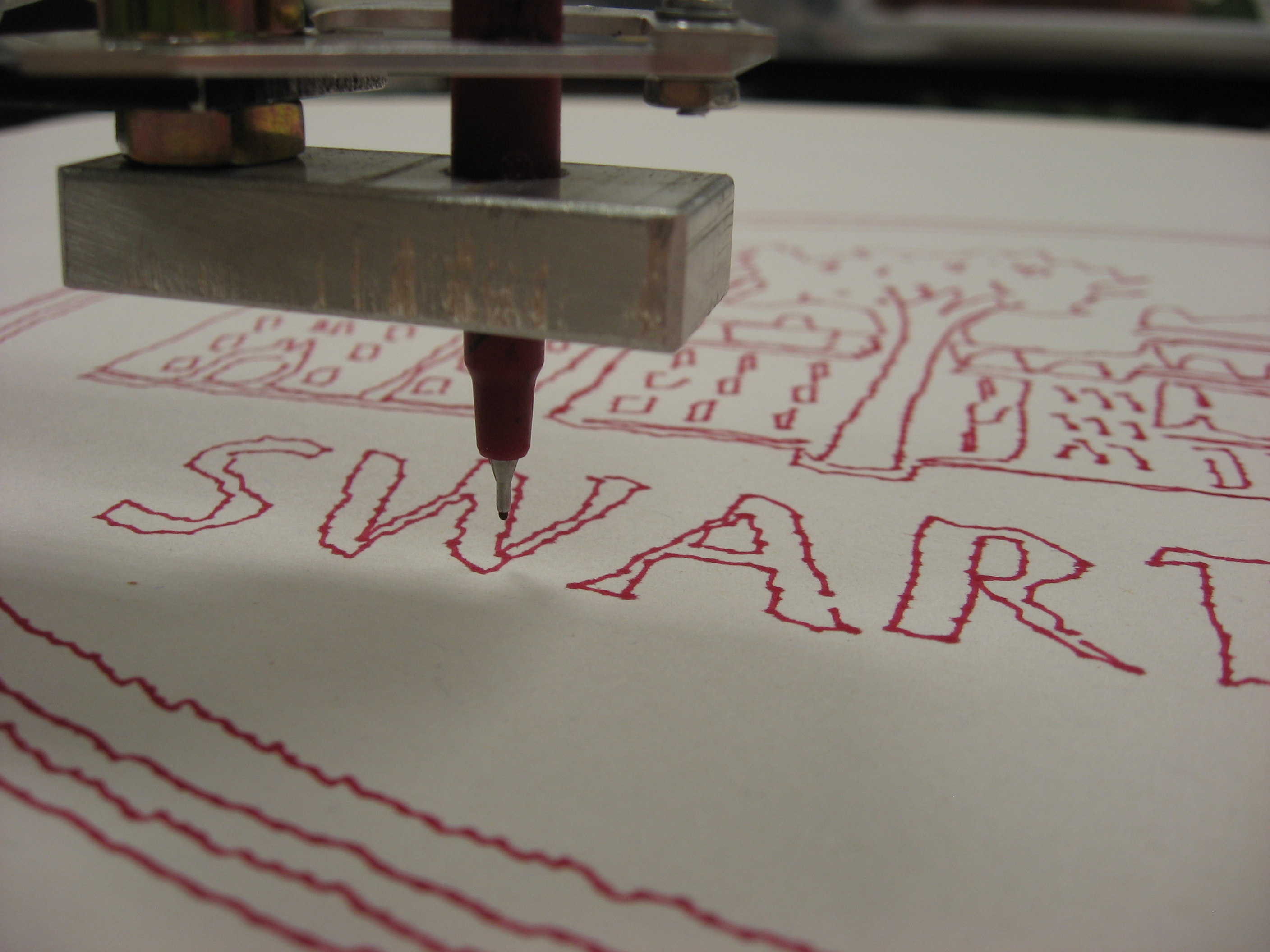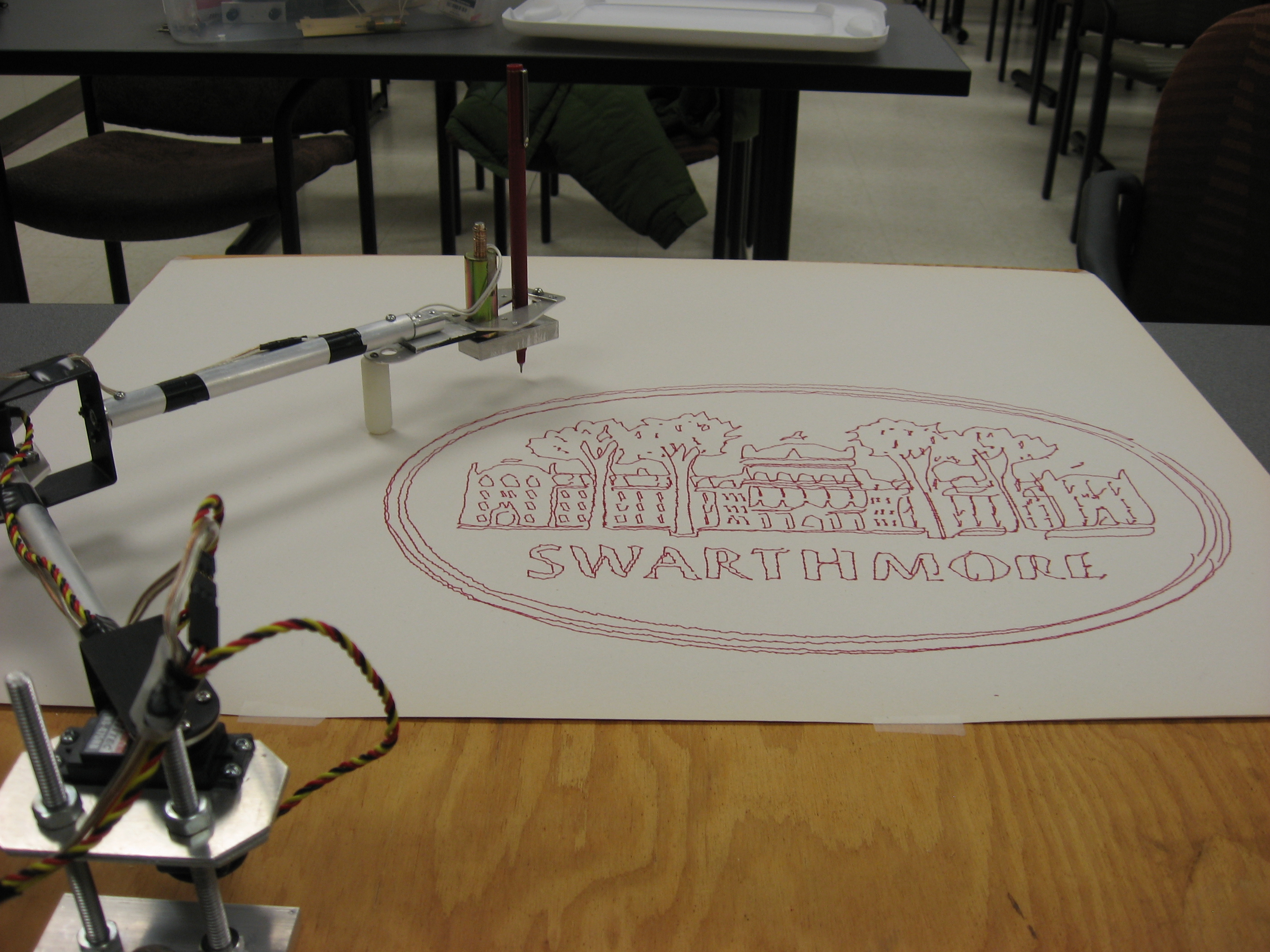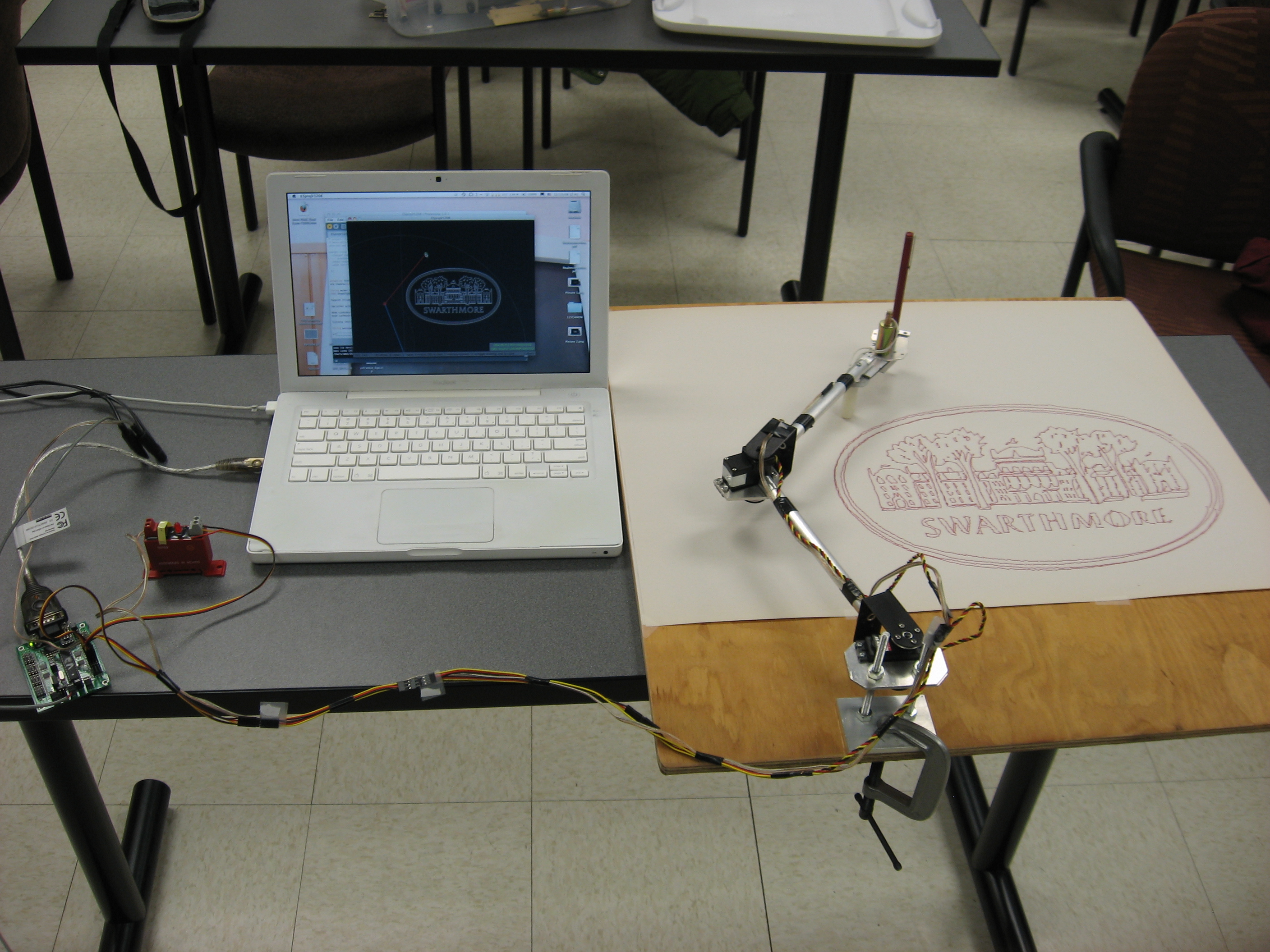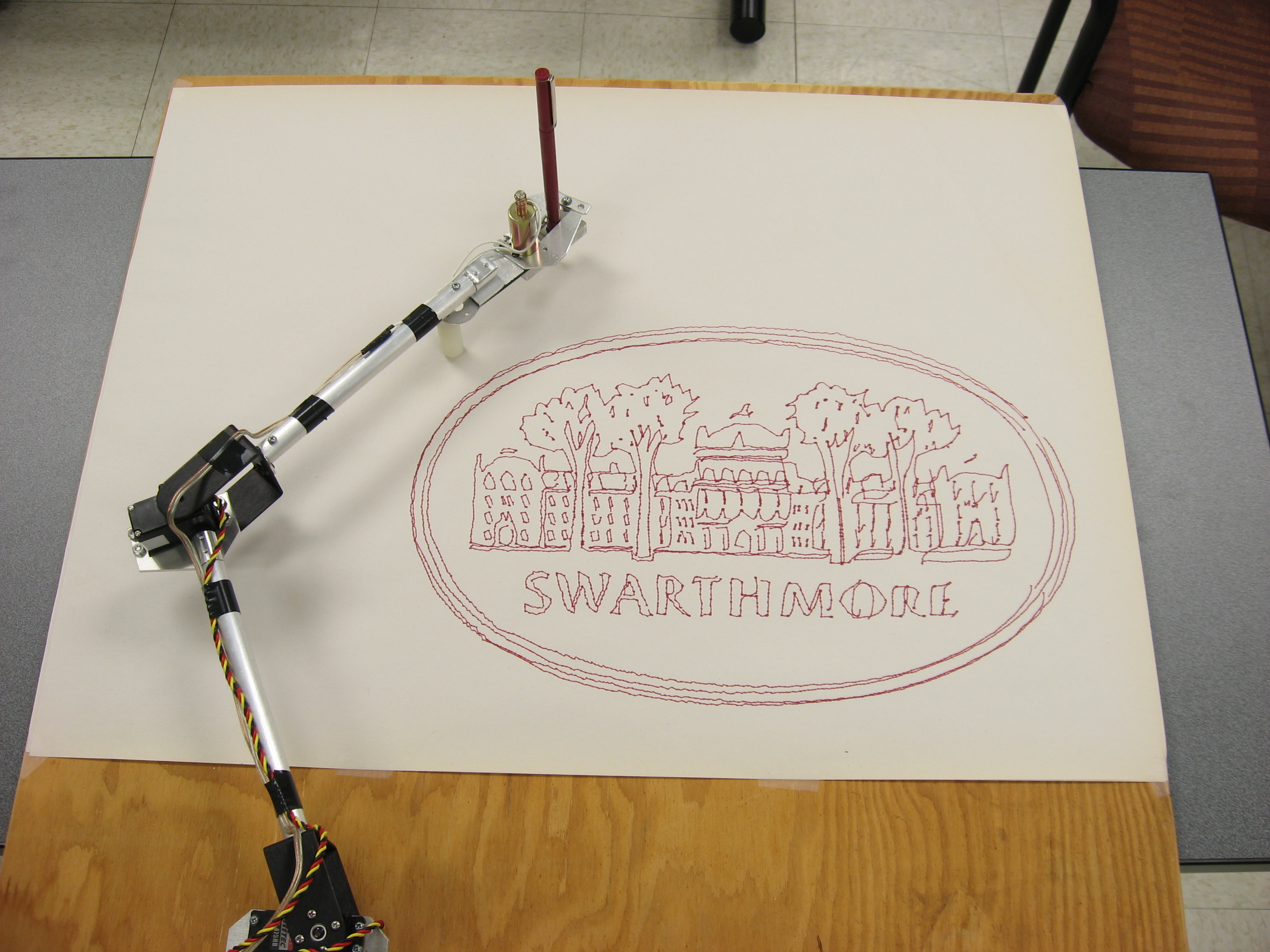
This arm was a project for an engineering class at Swarthmore College.
My lab partner Katherine and I (Ames) improved this arm (It was from a previous project) and wrote controlling software for it. We used Processing to write a friendly GUI that allows the user to either draw with the mouse, or import SVG path data from a file. The software will then trace the paths and send the angles to the servos of the robotic arm.
[from the vimeo page]
The project was completed 12 December, 2008
See the project page from the course wiki.
SwatLogoH264.mov
Quicktime H.264, 1280 x 720, 12 MB (vimeo)
SwatLogoJPG.mov
Quicktime JPEG, 1600 x 1200, 54 MB
(the raw timelapse frames, before compression)
RobotDemo.AVI
AVI JPEG, 640 x 480, 95 MB (vimeo)